Seperti
Indera pada manusia. Robot dapat mengenali lingkungannya dengan menggunakan
sensor. Seperti manusia yang dapat merasakan dingin dengan kulitnya, melihat
dengan matanya, mendengar dengan telinga, mengecap dengan lidahnya, dan mencium
dengan hidungnya.

Jika manusia hanya memiliki 5 indera secara fisik. Robot bisa memiliki lebih banyak dari itu, karena robot bisa menggunakan sensor apa saja. Robot bisa mendapat informasi lebih banyak, termasuk seperti indera pada hewan. Robot bisa memiliki semuanya.
Dari sisi
robot sensor dibedakan menjadi
- Sensor lokal (on-board) : yang terpasang pada robot
- Sensor global : yang terpasang di lingkungan yang mengirimkan data ke robot
Selain kedua
hal di atas, sensor juga dibedakan menjadi :
- sensor pasif : yang memonitor lingkungan tanpa mengganggunya
- sensor aktif : yang memberikan stimulasi ke lingkungan dalam pengukurannya.
Jenis-Jenis Sensor Pada Robot
Ada banyak sekali jenis sensor yang bisa ditanamkan pada robot. Dengan memiliki fungsi yang beragam juga. Diantaranya adalah;
1. Touch Sensor. Adalah jenis sensor yang akan mendeteksi ketika disentuh, ibarat kulit. Touch Sensor pada dasarnya adalah saklar yang memiliki berbagai jenis bentuk. Pada robot digunakan untuk misalnya; mendeteksi objek yang ada pada tangan robot, mencegah terjadinya tabrakan pada robot beroda, dan masih banyak lagi. Banyak robot yang memerlukan sensor sentuh sebagai kelengkapannya. Penggunaan sensor sentuh misalnya untuk mendeteksi keberadaan suatu obyek pada tangan robot dan mencegah tabrakan antara robot dengan suatu obyek. Di industri sensor jenis ini digunakan untuk menghitung produk yang dihasilkan dan juga untuk menyesuaikan orientasi suatu obyek selain juga dapat menggunakan sensor proksimiti.
Sensor sentuh pada dasarnya adalah saklar dengan berbagai macam variasi bentuknya. Rangkaian sensor sentuh pada umumnya menggunakan resistor pull-up ataupun pull-down seperti terlihat pada Gambar 0-1. Rangkaian menggunakan resistor pull-up bersifat active low yang berarti rangkaian mengeluarkan sinyal 1 kecuali saat saklar aktif. Hal ini berkebalikan dengan rangkaian menggunakan resistor pull-down yang bersifat active low, yaitu rangkaian mengeluarkan sinyal 0 kecuali saat saklar aktif. Nilai resistor pull-up dan pull down berkisar antara 1 – 10 kW. Dari kedua rangkaian tersebut, rangkaian pull-up lebih banyak digunakan dibanding rangkaian pull down.
Contoh sensor sentuh sederhana berupa sungut (whisker) beserta diagram pengkabelannya terdapat pada Gambar 0-2. Rangkaian ini sebetulnya merupakan rangkaian pull up dengan kedua sungut berfungsi sebagai saklar. Rangkaian akan mengeluarkan sinyal 1 saat sungut tidak tertekan. Jika sungut tertekan maka sinyal output akan menjadi 0 karena sungut dihubungkan dengan ground.
Pilihan lain yang dapat digunakan sebagai sensor sentuh adalah microswitch yang merupakan saklar SPDT. Microswitch adalah saklar tekan yang aktif jika ada obyek menyentuh/mendorong tuas dan sering juga disebut sebagai limit switch. Gambar 0-3 menunjukkan gambar microswitch dan contoh rangkaiannya.
Hal yang perlu diperhatikan dalam penggunaan sensor sentuh adalah robot yang menggunakan sensor ini haruslah dapat berhenti secara mendadak sehingga kurang cocok untuk robot dengan kecepatan tinggi. Untuk deteksi obyek lebih lanjut dapat digunakan sensor non-kontak seperti ultrasonik ataupun inframerah.

Contoh touch sensor yang paling sederhana adalah Push Button. Dan yang lebih baiknya bisa kamu lihat pada gambar atas.
2. Light Sensor. Sensor ini mendeteksi cahaya atau peka terhadap cahaya disekitarnya. Dengan sensor ini robot dapat mengetahui gelap dan terang suatu objek, tempat, siang atau malam.

Untuk menentukan gelap dan terang suatu tempat biasa menggunakan LDR Sensor, sementara untuk keperluan Robot Pengikut Garis (Line Follower) menggunakan InfraRed Sensor. erdapat banyak peranti yang dapat digunakan sebagai sensor cahaya antara lain fotoresistor, fotodioda, dan fototransistor. Berdasarkan panjang gelombangnya sensor cahaya diklasifikasikan menjadi sensor inframerah, cahaya tampak dan ultraviolet.
Sensor cahaya mempunyai banyak kegunaan pada sistem otomasi. Beberapa contohnya antara lain deteksi kertas pada printer, penentuan banyaknya lampu yang dibutuhkan suatu ruangan, dan penentuan nyala lampu blitz pada kamera.
Pada mobile robot sensor cahaya kebanyakan digunakan untuk dua hal, yaitu penjejak garis dan deteksi obyek. Robot penjejak garis menggunakan sensor cahaya untuk menentukan garis yang berwarna gelap dengan lantai yang berwarna terang atau sebaliknya. Sensor deteksi obyek dapat dibagi menjadi :
- sensor proksimasi : biasanya berupa sensor dengan output biner. Obyek hanya diketahui jika memasuki zona tertentu di sekitar robot, di luar zona itu obyek diabaikan.
- sensor pengukuran jarak : selain mengetahui keberadaan suatu obyek, sensor juga dapat mengetahui jarak obyek dari robot dalam rentang jarak tertentu.
Selain kedua
penggunaan utama tersebut, sensor cahaya dapat juga digunakan sebagai pengukur
temperatur (inframerah) dan sensor api (ultraviolet).
Fotoresistor atau sering juga disebut sebagai Light Dependant Resistor adalah resistor yang mempunyai nilai resistansi yang berubah sesuai dengan intensitas cahaya tampak yang menimpanya. Elemen pada fotoresistor terbuat dari Cadmium Sulfida (CdS) yang peka terhadap cahaya tampak. Intensitas cahaya berbanding terbalik dengan nilai resistansi fotoresistor, atau dengan kata lain sebanding dengan nilai konduktansinya. Keadaan gelap menyebabkan nilai resistansi meningkat, sedangkan keadaan terang menyebabkan nilai resistansi berkurang. Nilai resistansi fotoresistor berkisar antara beberapa ohm hingga beberapa kilo ohm.
Fotoresistor dihubungkan dengan resistor lain untuk membentuk rangkaian pembagi tegangan untuk diukur beda tegangannya. Gambar 0-5 menunjukkan rangkaian fotoresistor, untuk (a) tegangan output sebanding dengan intensitas cahaya, sedangkan pada (b) tegangan berbanding terbalik dengan intensitas cahaya. Nilai R dipilih sehingga nilai Vout diusahakan berada pada rentang 0 – 5 V. Untuk penggunaan umum nilai R dapat dipilih 330 atau 470 W. Output dari rangkaian fotoresistor dapat dihubungkan dengan komparator untuk mendapatkan sinyal biner (on/off) ataupun ADC. Cara lain mengukur nilai resistansi fotoresistor adalah dengan mengukur waktu RC yang akan dijelaskan pada bagian pengkondisi sinyal. Fotoresistor mempunyai kelemahan dibanding fototransistor ataupun fotodioda yaitu waktu responsnya yang relatif lambat.
Fototransistor adalah transistor (biasanya dari jenis NPN) yang dapat meneruskan arus sesuai dengan banyaknya intensitas cahaya yang mengenainya. Berbeda dengan fotoresistor yang peka terhadap cahaya tampak, fototransistor dan juga fotodioda lebih peka terhadap cahaya pada spektrum inframerah. Cahaya pada fototransistor menggantikan peranan arus basis, semakin banyak intensitas cahaya, semakin banyak arus yang dapat dialirkan dari kolektor ke emitor.
Contoh rangkaian fototransistor ditunjukkan pada Gambar 0-6. Rangkaian tersebut bersifat active low, yang berarti tegangan output berbanding terbalik dengan intensitas cahaya yang diterima. Output rangkaian fototransistor biasanya dihubungkan dengan pengkondisi sinyal biner seperti inverting transistor, komparator, ataupun Schmidt trigger. Fototransistor sering ditemui dalam kemasan berpasangan dengan LED (biasanya inframerah) membentuk rangkaian optokopler (atau optoisolator) dan optoreflektor.
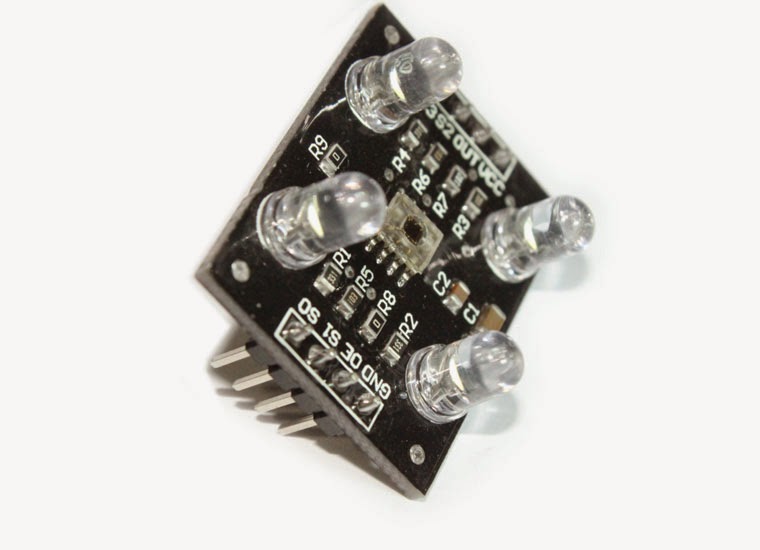
3. Color Sensor. Sama seperti light sensor atau Infra Red sensor, color sensor juga bisa mendeteksi gelap terang dengan menangkap warna hitam dan putih. Tapi selain itu, Color Sensor juga dapat mendeteksi warna lainnya seperti merah, biru, kuning, dan sebagainya.
Fotoresistor atau sering juga disebut sebagai Light Dependant Resistor adalah resistor yang mempunyai nilai resistansi yang berubah sesuai dengan intensitas cahaya tampak yang menimpanya. Elemen pada fotoresistor terbuat dari Cadmium Sulfida (CdS) yang peka terhadap cahaya tampak. Intensitas cahaya berbanding terbalik dengan nilai resistansi fotoresistor, atau dengan kata lain sebanding dengan nilai konduktansinya. Keadaan gelap menyebabkan nilai resistansi meningkat, sedangkan keadaan terang menyebabkan nilai resistansi berkurang. Nilai resistansi fotoresistor berkisar antara beberapa ohm hingga beberapa kilo ohm.
Fotoresistor dihubungkan dengan resistor lain untuk membentuk rangkaian pembagi tegangan untuk diukur beda tegangannya. Gambar 0-5 menunjukkan rangkaian fotoresistor, untuk (a) tegangan output sebanding dengan intensitas cahaya, sedangkan pada (b) tegangan berbanding terbalik dengan intensitas cahaya. Nilai R dipilih sehingga nilai Vout diusahakan berada pada rentang 0 – 5 V. Untuk penggunaan umum nilai R dapat dipilih 330 atau 470 W. Output dari rangkaian fotoresistor dapat dihubungkan dengan komparator untuk mendapatkan sinyal biner (on/off) ataupun ADC. Cara lain mengukur nilai resistansi fotoresistor adalah dengan mengukur waktu RC yang akan dijelaskan pada bagian pengkondisi sinyal. Fotoresistor mempunyai kelemahan dibanding fototransistor ataupun fotodioda yaitu waktu responsnya yang relatif lambat.
Fototransistor adalah transistor (biasanya dari jenis NPN) yang dapat meneruskan arus sesuai dengan banyaknya intensitas cahaya yang mengenainya. Berbeda dengan fotoresistor yang peka terhadap cahaya tampak, fototransistor dan juga fotodioda lebih peka terhadap cahaya pada spektrum inframerah. Cahaya pada fototransistor menggantikan peranan arus basis, semakin banyak intensitas cahaya, semakin banyak arus yang dapat dialirkan dari kolektor ke emitor.
Contoh rangkaian fototransistor ditunjukkan pada Gambar 0-6. Rangkaian tersebut bersifat active low, yang berarti tegangan output berbanding terbalik dengan intensitas cahaya yang diterima. Output rangkaian fototransistor biasanya dihubungkan dengan pengkondisi sinyal biner seperti inverting transistor, komparator, ataupun Schmidt trigger. Fototransistor sering ditemui dalam kemasan berpasangan dengan LED (biasanya inframerah) membentuk rangkaian optokopler (atau optoisolator) dan optoreflektor.
3. Color Sensor. Sama seperti light sensor atau Infra Red sensor, color sensor juga bisa mendeteksi gelap terang dengan menangkap warna hitam dan putih. Tapi selain itu, Color Sensor juga dapat mendeteksi warna lainnya seperti merah, biru, kuning, dan sebagainya.

Pada aplikasinya color sensor juga bisa digunakan untuk membuat robot Line Follower, bahkan yang lebih canggih, yaitu: dapat mengikuti garis dengan warna yang lebih spesifik.
4. Distance Sensor. Adalah jenis sensor yang digunakan untuk mendeteksi objek dengan cara mengukur jarak objek tersebut. Sensor ini bisa mengukur jarak dengan sangat akurat. Dalam robot, Distance Sensor berguna sebagai mata. Robot dapat melihat objek didepannya dengan sensor ini.

Contoh Distance Sensor yang paling sering digunakan adalah Ultrasonic sensor. Cara kerjanya sama persis seperti mulut dan telinga pada kelelawar.
5. Sound Sensor. Mendeteksi suara disekitar robot, fungsinya tentu saja seperti telinga. Melalui program sensor ini bisa membedakan suara yang nyaring, suara yang tidak nyaring, dan hening. Intensitasnya bisa kita atur manual, atau melalui program, tergantung jenis Sound Sensor yang dipakai.

Bahkan untuk jenis Voice Recognition, itu bisa diprogram untuk mendengar kata (bahasa) yang digunakan manusia.
6. Balance Sensor. Biasa digunakan untuk membuat robot tetap seimbang. Mengetahui kemiringan, dan membantu bangun saat robot terjatuh.

Salah satu contohnya adalah Gyroscope, dipakai juga pada Smartphone.
7. Gas Sensor. Berfungsi untuk mendeteksi berbagai jenis gas atau asap yang ada disekitar. Seperti hidung pada manusia, dapat membedakan yang mana gas yang biasa mana gas yang berbahaya.

Contoh penerapan gas Sensor adalah untuk robot penjinak Bom, atau robot GreenBird.
8. Temperatur Sensor. Sama seperti kulit yang dapat merasakan panas dan dingin. Dengan temperatur sensor robot dapat mengenali suhu yang ada disekitarnya.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
9. Infrared Sensor Sinar inframerah adalah sinar atau gelombang
elektromagnet yang mempunyai frekuensi lebih rendah (atau dengan kata lain
panjang gelombang lebih besar) dari warna merah. Penggunaan inframerah yang
paling populer adalah pada peranti remote control TV. Pada robot, selain untuk
remote control inframerah juga dapat digunakan sebagai sensor proksimasi
ataupun pengukur jarak. Untuk itu diperlukan LED inframerah dan penerima
inframerah, yang memuat detektor inframerah beserta pelengkapnya seperti tapis,
penguat, dan demodulator. Sinar inframerah yang dipancarkan mempunyai frekuensi
38 – 40 kHz untuk membedakan dengan pancaran sinar inframerah lain (misal dari
lampu atau sinar matahari). Pada penerima demodulator digunakan mengubah sinyal
tersebut menjadi sinyal biner biasa.
Salah satu contoh sensor inframerah untuk penentuan jarak adalah GPD2D12 dari Sharp. Sensor ini sebenarnya digunakan untuk peranti peringatan jarak pada mobil dan deteksi banyaknya kertas pada mesin fotokopi. Output dari sensor ini adalah bilangan biner 8 bit yang mewakili jarak antara 10 – 80 cm. Prinsip kerja sensor ini adalah mengukur kemiringan pantulan dari sinar inframerah yang dipantulkan oleh suatu obyek (Gambar 0-10). Semakin dekat obyek berada semakin besar pula sudut pantulan sinar inframerah.
Jenis lain sensor inframerah adalah Passive Infra Red (PIR). PIR dapat digunakan untuk mendeteksi manusia atau binatang yang ada di dekatnya melalui radiasi inframerah dari panas tubuh yang dipancarkan. Sensor ini digunakan misalnya pada pintu otomatis atau sistem alarm.
Salah satu contoh sensor inframerah untuk penentuan jarak adalah GPD2D12 dari Sharp. Sensor ini sebenarnya digunakan untuk peranti peringatan jarak pada mobil dan deteksi banyaknya kertas pada mesin fotokopi. Output dari sensor ini adalah bilangan biner 8 bit yang mewakili jarak antara 10 – 80 cm. Prinsip kerja sensor ini adalah mengukur kemiringan pantulan dari sinar inframerah yang dipantulkan oleh suatu obyek (Gambar 0-10). Semakin dekat obyek berada semakin besar pula sudut pantulan sinar inframerah.
Jenis lain sensor inframerah adalah Passive Infra Red (PIR). PIR dapat digunakan untuk mendeteksi manusia atau binatang yang ada di dekatnya melalui radiasi inframerah dari panas tubuh yang dipancarkan. Sensor ini digunakan misalnya pada pintu otomatis atau sistem alarm.
10.
Akselerometer adalah sensor yang digunakan untuk mengukur
percepatan (perubahan kecepatan). Pada robot akselerometer dapat digunakan pada
robot untuk aplikasi antara lain robot swatimbang (self balanced robot), robot
berjalan, deteksi benturan, detektor getaran, dan deteksi G-force. Salah satu
contoh akselerometer adalah modul Memsic MX2125 dari Parallax. Sensor ini dapat
mengindra percepatan pada dua sumbu.
Output dari sensor ini adalah PWM yang menunjukkan hubungan dengan :
A = besarnya percepatan, g
T1 = waktu saat pulsa high
T2 = waktu total = 10 ms
Output dari sensor ini adalah PWM yang menunjukkan hubungan dengan :
A = besarnya percepatan, g
T1 = waktu saat pulsa high
T2 = waktu total = 10 ms
Sumber :
Thank you !!
BalasHapusi love it
BalasHapus